The University of Edinburgh and Japan Science & Technology (JST) Collaborative Moonshot Project
Monitoring and Intervention in Neural Degeneration
Wearable sensors enable us to monitor activities of daily living, and together with AI, allow us to detect neural degeneration early. In multiple sclerosis (MS) and Parkinson's disease (PD), an early detection of the symptoms can lead to early treatment and improved quality of life.
In this project, in collaboration with Nagoya and Tokyo University in Japan and the Cajal Institute in Spain, we develop algorithms to monitor the progression of neurodegenerative diseases and treat some of the symptoms in people with MS and PD using wearable sensors, AI and functional electrical stimulation.
This project directly contributes to the Goal 3 of the Moonshot programme: Realisation of AI robots that autonomously learn, adapt to their environment, evolve in intelligence and act alongside human beings, by 2050.
Project Collaboration Timeline: First Phase (June 1, 2024 to November 30, 2025)
Moonshot: Addressing Neural Degeneration Project Team (front) Sethu Vijayakumar, Don Mahad, Andreas Christou (back) Suzanne Perry, Maithili Vijayakumar, Georgia Andreopoulou, Elliot Lister, Andreas Sochopoulos.
Paper presentation @ BIBE 2025
November 2025
Contribution type: Conference paper publication
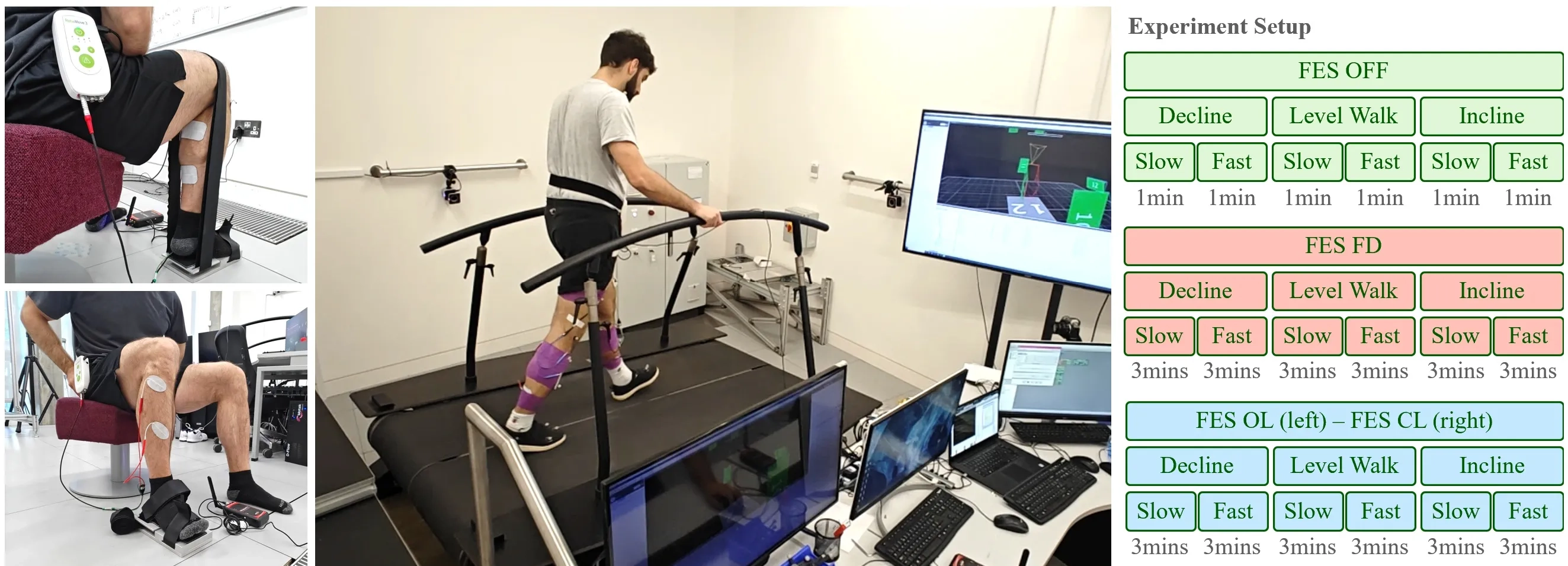
Foot drop is often treated using Functional Electrical Stimulation (FES) with fixed, open-loop intensity settings, which can cause muscle fatigue or insufficient dorsiflexion. This study introduces a closed-loop FES controller that adjusts stimulation in real time based on toe clearance, providing “assistance as needed.” Testing with healthy participants under induced foot drop showed that the closed-loop system maintained adequate toe clearance using significantly lower stimulation intensities than an open-loop controller, without altering hip, knee, or ankle kinematics. These results indicate improved comfort, reduced fatigue, and potential for better long-term adherence.
Andreas Christou, Elliot Lister, Georgia Andreopoulou, Don Mahad and Sethu Vijayakumar, Assist-as-needed control for FES in foot drop management, 25th IEEE International Conference on BioInformatics and BioEngineering (BIBE 2025), Athens, Greece (2025). [pdf] [video] [citation]
Workshop presentation @ Humanoids 2025
October 2025
Contribution type: Conference presentation
Foot drop, a common symptom that increases fall risk, severely limits patient mobility. Functional Electrical Stimulation (FES) manages this condition by activating muscles to support gait. However, most FES devices are open-loop systems with a fixed stimulation intensity, which can cause muscle fatigue or provide inadequate support. To overcome this, we developed a novel closed-loop controller that provides “assistance as needed” by adjusting stimulation in real-time based on toe clearance.
Andreas Christou, Elliot Lister, Georgia Andreopoulou, Don Mahad and Sethu Vijayakumar Assist-as-needed Control for FES in Foot Drop Management Assistive Robotics for Caregiving workshop
Paper presentation @ CoRL 2025
September 2025
Contribution type: Conference paper publication
We present COT Policy, a framework for training flow models that have inherently fast inference. We tackle the problem of accelerating the inference of flow and diffusion models in action generation problems (and not only!) while keeping the ability to generate multimodal trajectories. If you are interested in learning more about how you can train a fast flow policy without distillation and with the same training complexity as vanilla diffusion models, check out our paper!
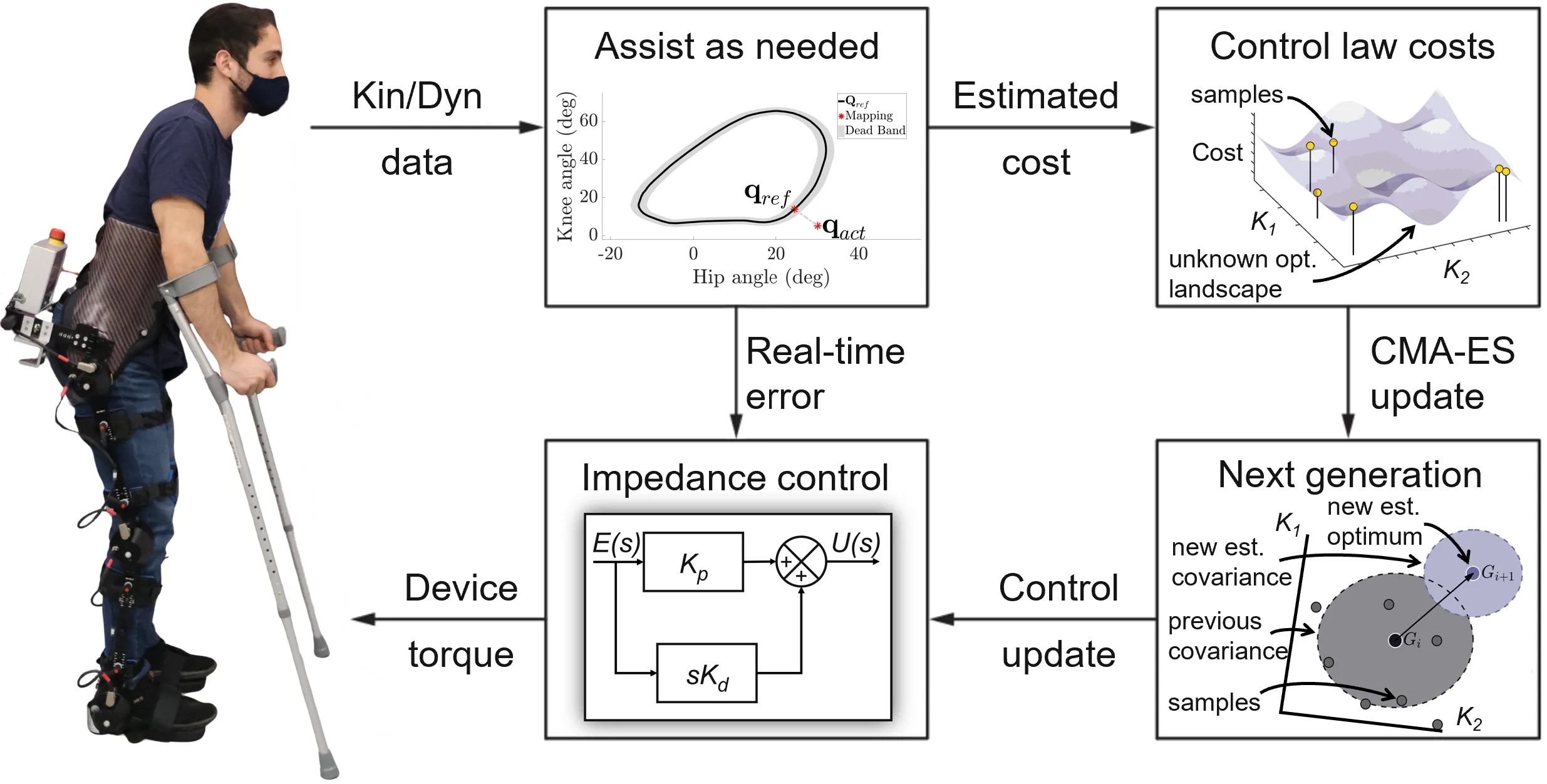
Human-in-the-loop (HILO) techniques hold strong potential for personalising robotic assistance, yet remain underexplored in gait rehabilitation. In this project, we used CMA-ES to optimise joint stiffness in a lower-limb exoskeleton during gait training. The optimiser successfully adapted to individual users, identifying consistent and personalised control strategies. While human-robot co-adaptation and motor variability may have masked performance gains, the results demonstrate the feasibility of continuous, real-time personalisation of robot assistance in gait training using human-in-the-loop optimisation, offering valuable insights for future rehabilitation technologies.
Andreas Christou, Andreas Sochopoulos, Elliot Lister and Sethu Vijayakumar, Human-in-the-Loop Optimisation in Robot-Assisted Gait Training, Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025), Hangzhou, China (2025). [pdf] [video] [citation]
Women in Computing 2024 @ St George's School, Edinburgh, UK
December 11, 2024
Contribution Type: Outreach
The Women in Computing event at St George’s School (Edinburgh, UK) was an inspiring initiative to spark curiosity and encourage women to explore careers in STEM. The event aimed to highlight the exciting possibilities in technology, engineering, robotics, and computing through interactive talks, engaging panel discussions, and hands-on demonstrations. Our team was proud to participate, engaging with young students in order to provide career advice and role models that will inspire the next generation and awaken their interest in computing.
Invited Talk and Moonshot Meeting @ ICNR 2024, La Granja, Spain
November 5, 2024
Contribution Type: Symposium and Presentations
A conversation about the integration of robotics and functional electrical stimulation in gait rehabilitation with world-leading experts. We presented our adaptive hybrid robot-FES controller and discussed the challenges and promises of hybrid interventions in neurorehabilitation. Members of the Moonshot project from Edinburgh University (UK), Nagoya University (Japan) and the Centre for Automation and Robotics (Spain) proceeded with a meeting to examine the interface and usability of the novel sensorized shoes, Shokac Shoes (Touchence Inc.), to be used as a tool for detecting and monitoring neurodegeneration.
Invited Talk @ BioRob 2024, Heidelberg, Germany
September 1, 2024
Contribution Type: Symposium and Presentations
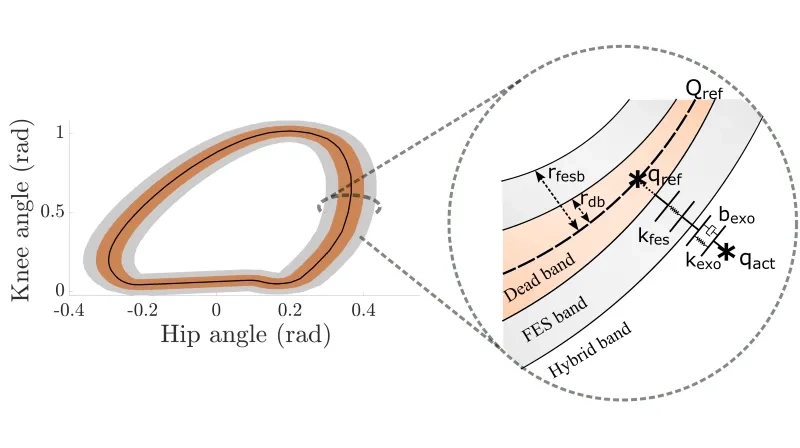
The hybridisation of robot-assisted gait training and functional electrical stimulation (FES) can provide numerous physiological benefits to neurological patients. However, the design of an effective hybrid controller poses significant challenges. In this over-actuated system, it is extremely difficult to find the right balance between robotic assistance and FES that will provide personalised assistance, prevent muscle fatigue and encourage the patient’s active participation in order to accelerate recovery. In this work, we present an adaptive hybrid robot-FES controller to do this and enable the triadic collaboration between the patient, the robot and FES. A patient-driven controller is designed where the voluntary movement of the patient is prioritised and assistance is provided using FES and the robot in a hierarchical order depending on the patient’s performance and their muscles’ fitness.
Andreas Christou, Antonio J. del-Ama, Juan C. Moreno and Sethu Vijayakumar, Adaptive Control for Triadic Human-Robot-FES Collaboration in Gait Rehabilitation: A Pilot Study, Proc. IEEE International Conference on Robotics and Automation (ICRA 2024), Yokohama, Japan (2024). [pdf] [video] [citation]
First Steps @ Bayes Centre, Edinburgh, UK
August 1, 2024
News: Data Collection Phase
Motion capture and gait analysis are advanced techniques used to study human movement, and particularly the way people walk, or their "gait." We have now begun collecting data from healthy participants walking under various conditions on a treadmill to better understand and characterise gait. To carry out this research, we use the gold-standard in motion capture, including a marker-based system with high-precision cameras and an instrumented treadmill capable of recording ground reaction forces.
AI in Healthcare Workshop @ Informatics, Edinburgh, UK
May 30, 2024
Contribution Type: Seminar and Live Demonstrations
AI and embodied robotics solutions are playing an increasingly significant role in addressing some of the most pressing grand challenges in healthcare and assisted living in our society. For successful, safe and effective deployment of these fast-changing technologies, it is important that we work closely and collaboratively with different stakeholders.
In this workshop, we bring together end-users in care homes, hospitals and rehabilitation centres; world-leading researchers from academia including European and international consortia; startup companies and established industry players in this space; as well as policymakers and researchers who look at the ethics and governance structures that inform deployment strategies.